开发环境:
RT-Thread版本:4.0.3
操作系统:Windows10
Keil版本:V5.30
RT-Thread Studio版本:2.0.1
开发板MCU:STM32H750XB
从本章开始,笔者不在就某一个单一功能讲解,而是针对某一个具体的项目作为讲解的主要内容。
7.1前言
第一个项目是一个环境监测系统,我相信很多朋友都做过,我这里主要从宏观层面来把握,你学会这个系统,那么你就可以将其移植到很多实际场景。
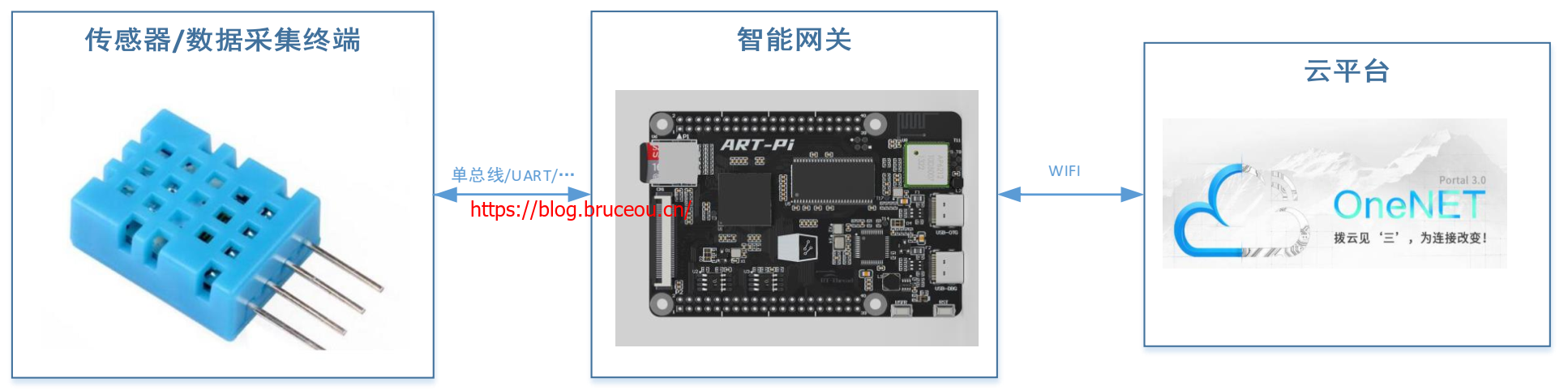
环境监测系统分为三个部分,一部分是终端节点,也就是采集环境信息,一般通过组网方式将各个节点汇聚到一个终端,再由该终端进行转发,常见的组网方式有ZigBee、BLE等。中间部分就是网关,它负责将各个终端的数据通过网络传到云端,根据实际的业务需求来购置相应的设备。最后一块就是云服务器了,当然现在云服务很多,免费版的也不少。环境监测架构如下图所示:
7.2环境数据获取
为了简单起见,我这里使用RT-Thread Studio开发,关于如何使用RT-Thread Studio创建项目,请参看官方手册。
7.2.1 RT-Thread Studio创建项目
第一个项目笔者还是简单讲解下,首先打开RT-Thread Studio,新建项目。
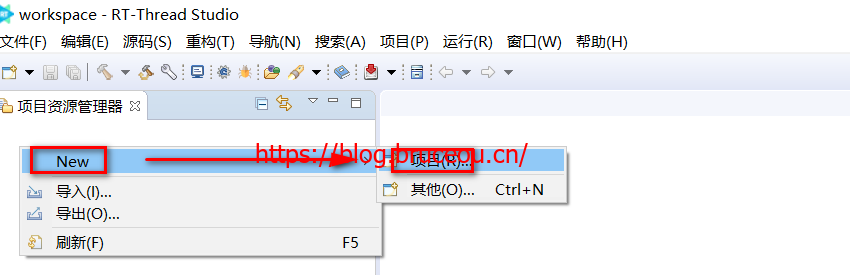
接下来选择新建“RT-Thread项目”,然后点击“下一步”。
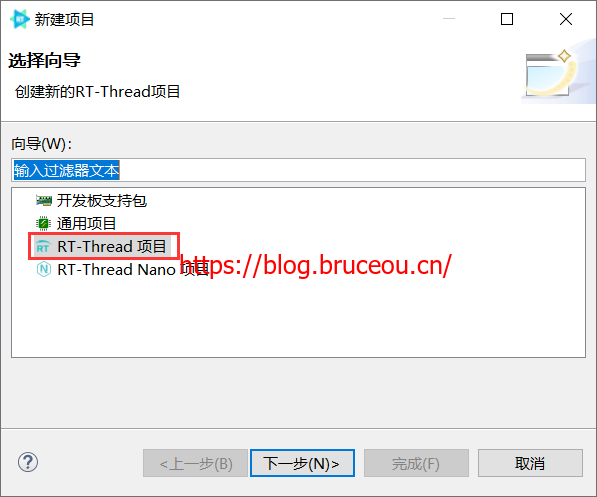
接下来填写工程名,选择开发板ART-Pi,其他默认即可。
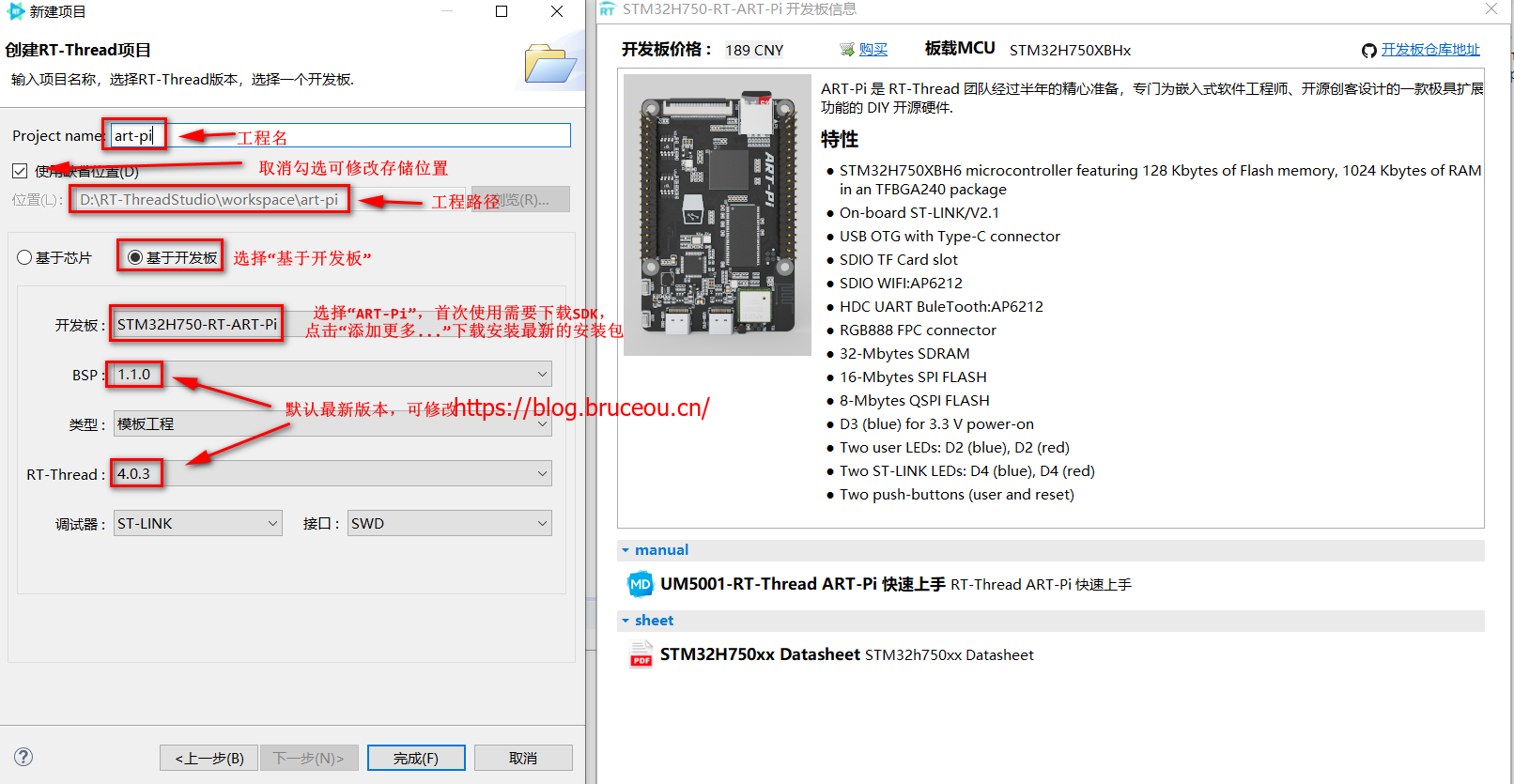
点击“完成”,稍等片刻即可完成项目的创建。当然接下来你也可以使用MDK开发,我这里还是继续使用RT-Thread Studio开发。
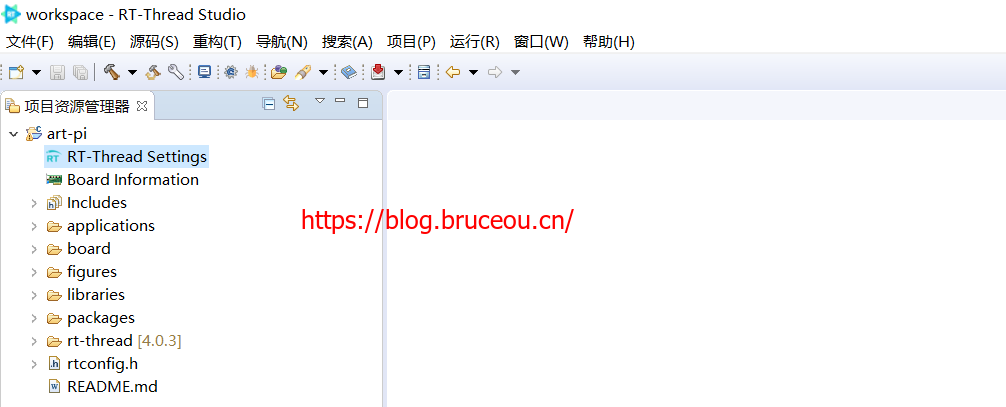
工程创建好了,接下里就是开发工作了。
7.2.2 DHT11获取温湿度
RT-Thread提供了DHT11的驱动软件包,配置如下:
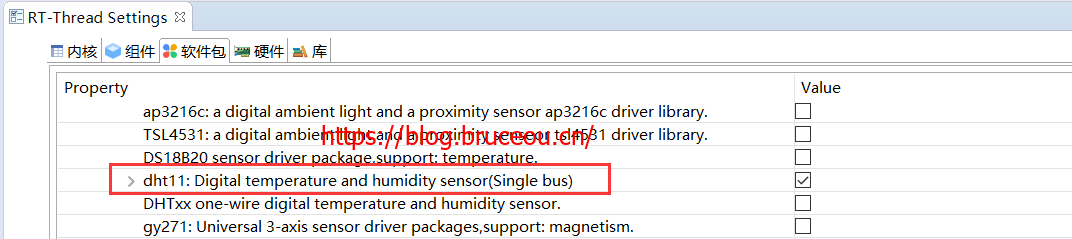
DHT11默认使用的 GPIO是 GPIOB_12。当然这是可以修改的,在 dht11_sample.c 中修改以下代码:
#define DHT11_DATA_PIN GET_PIN(B, 12)笔者这里直接接到默认引脚上,我就不修改了。
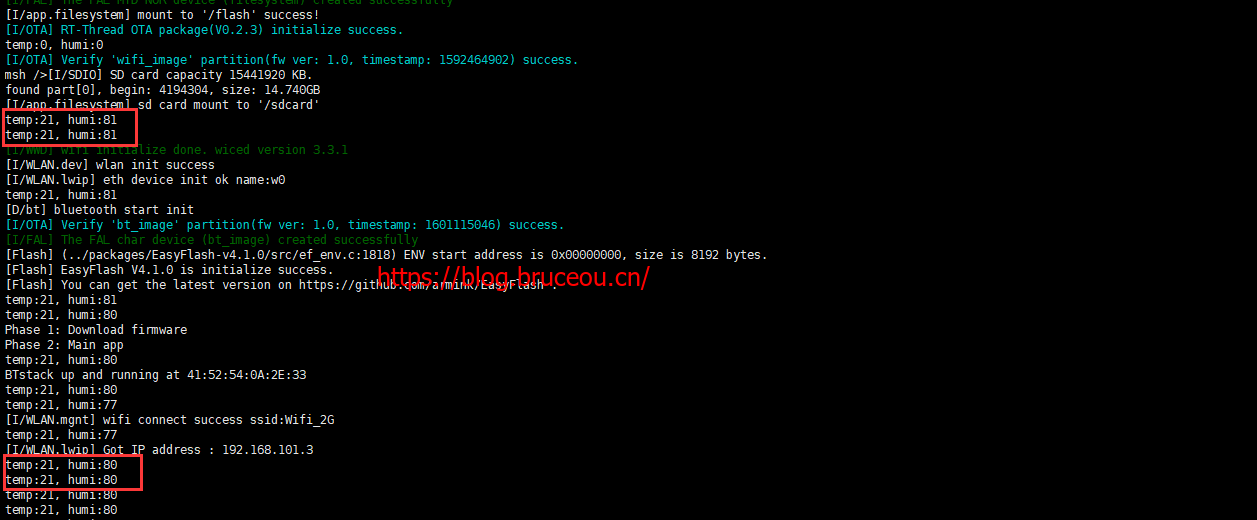
程序编译下载到板卡后,会在串口中每 1s 打印一次温湿度数据。
既然驱动有现成的,那么只需要写个相应的应用代码即可。后文需要将得到温湿度值上传至云端,应用部分的代码如下:
#include <rtthread.h>
#include <rtdevice.h>
#include "sensor.h"
#include "sensor_dallas_dht11.h"
#include "drv_gpio.h"
/* Modify this pin according to the actual wiring situation */
#define DHT11_DATA_PIN GET_PIN(B, 12)
typedef struct{
uint8_t temp;
uint8_t humi;
}rt_dht11;
rt_dht11 dht11;
static void read_temp_entry(void *parameter)
{
rt_device_t dev = RT_NULL;
struct rt_sensor_data sensor_data;
rt_size_t res;
rt_uint8_t get_data_freq = 1; /* 1Hz */
dev = rt_device_find("temp_dht11");
if (dev == RT_NULL)
{
return;
}
if (rt_device_open(dev, RT_DEVICE_FLAG_RDWR) != RT_EOK)
{
rt_kprintf("open device failed!\n");
return;
}
rt_device_control(dev, RT_SENSOR_CTRL_SET_ODR, (void *)(&get_data_freq));
while (1)
{
res = rt_device_read(dev, 0, &sensor_data, 1);
if (res != 1)
{
rt_kprintf("read data failed! result is %d\n", res);
rt_device_close(dev);
return;
}
else
{
if (sensor_data.data.temp >= 0)
{
dht11.temp = (sensor_data.data.temp & 0xffff) >> 0; // get temp
dht11.humi = (sensor_data.data.temp & 0xffff0000) >> 16; // get humi
rt_kprintf("temp:%d, humi:%d\n" ,dht11.temp, dht11.humi);
}
}
rt_thread_delay(1000);
}
}
static int dht11_thread(void)
{
rt_thread_t dht11_thread;
dht11_thread = rt_thread_create("dht_tem",
read_temp_entry,
RT_NULL,
1024,
RT_THREAD_PRIORITY_MAX / 2,
20);
if (dht11_thread != RT_NULL)
{
rt_thread_startup(dht11_thread);
}
return RT_EOK;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(dht11_thread, dht11 thread);
static int rt_hw_dht11_port(void)
{
struct rt_sensor_config cfg;
cfg.intf.user_data = (void *)DHT11_DATA_PIN;
rt_hw_dht11_init("dht11", &cfg);
return RT_EOK;
}
INIT_COMPONENT_EXPORT(rt_hw_dht11_port);7.2.3 DHT11总结
RT-Thread包含DHT11驱动,这里就没有去造轮子了,但是作为学习者,还是要去了解DHT11的原理及具体实现。这部分内容在笔者博客的STM32系列的外设篇已详细阐述,下面就DHT11驱动在RTT中的实现做个总结。
DHT11是采用单总线通讯的传感器,有的设备没有硬件单总线,DHT11的支持包采用 GPIO 模拟单总线时序。DHT11 的一次完整读时序需要 20ms,时间过长,故无法使用关中断或者关调度的方式实现独占 CPU 以保证时序完整正确。因此可能出现读取数据失败的情况。
DHT11的典型电路如下图所示。
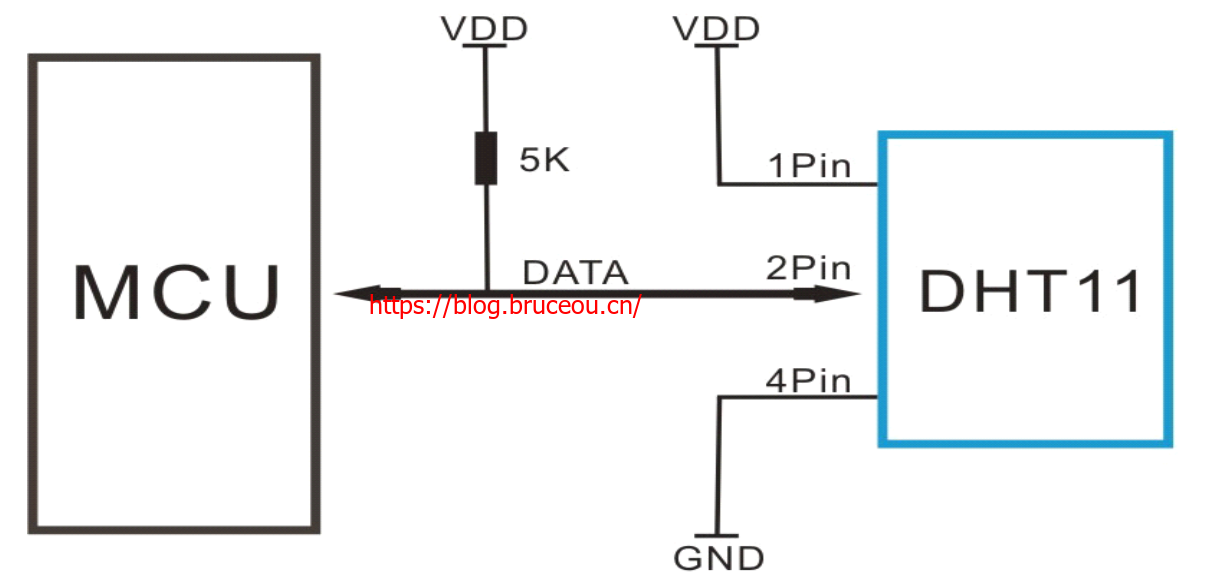
DATA 用于微处理器与 DHT11之间的通讯和同步,采用单总线数据格式,一次通讯时间4ms左右,数据分小数部分和整数部分,具体格式在下面说明,当前小数部分用于以后扩展,现读出为零.操作流程如下:
一次完整的数据传输为40bit,高位先出。
数据格式:8bit湿度整数数据+8bit湿度小数数据+8bi温度整数数据+8bit温度小数数据+8bit校验和
数据传送正确时校验和数据等于“8bit湿度整数数据+8bit湿度小数数据+8bi温度整数数据+8bit温度小数数据” 所得结果的末8位。
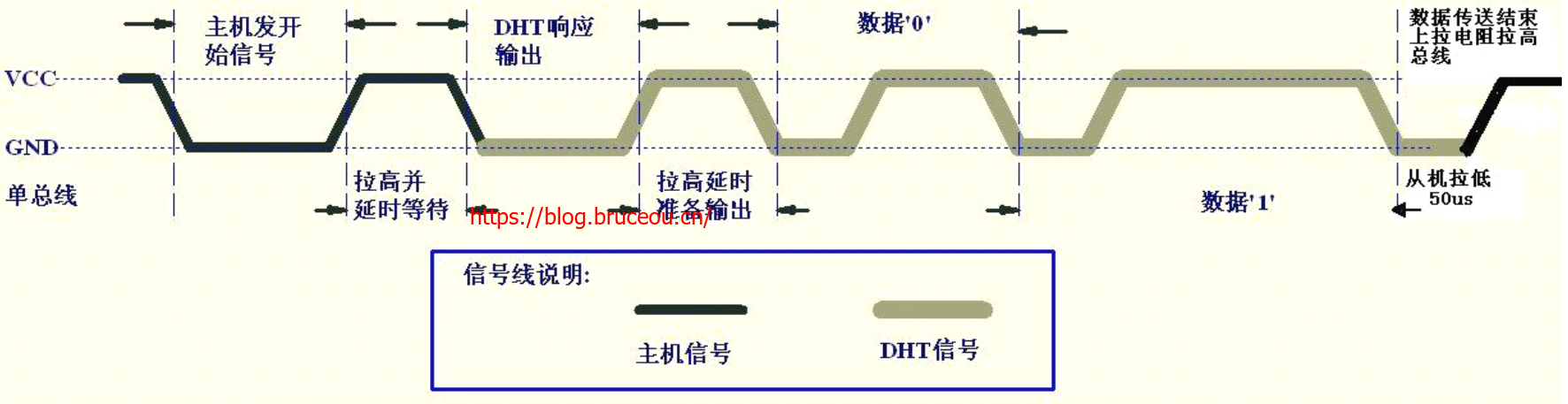
用户MCU发送一次开始信号后,DHT11从低功耗模式转换到高速模式,等待主机开始信号结束后,DHT11发送响应信号,送出40bit的数据,并触发一次信号采集用户可选择读取部分数据。从模式下,DHT11接收到开始信号触发一次温湿度采集,如果没有接收到主机发送开始信号,DHT11不会主动进行温湿度采集.采集数据后转换到低速模式。通讯过程如下图所示:
熟悉RT-Thread系统都知道,RT-Thread将各个模块进行抽象,为上层提供统一的操作接口,依次提高上层代码的可重用性,自然也提高了应用开发效率。RT-Thread的驱动框架:
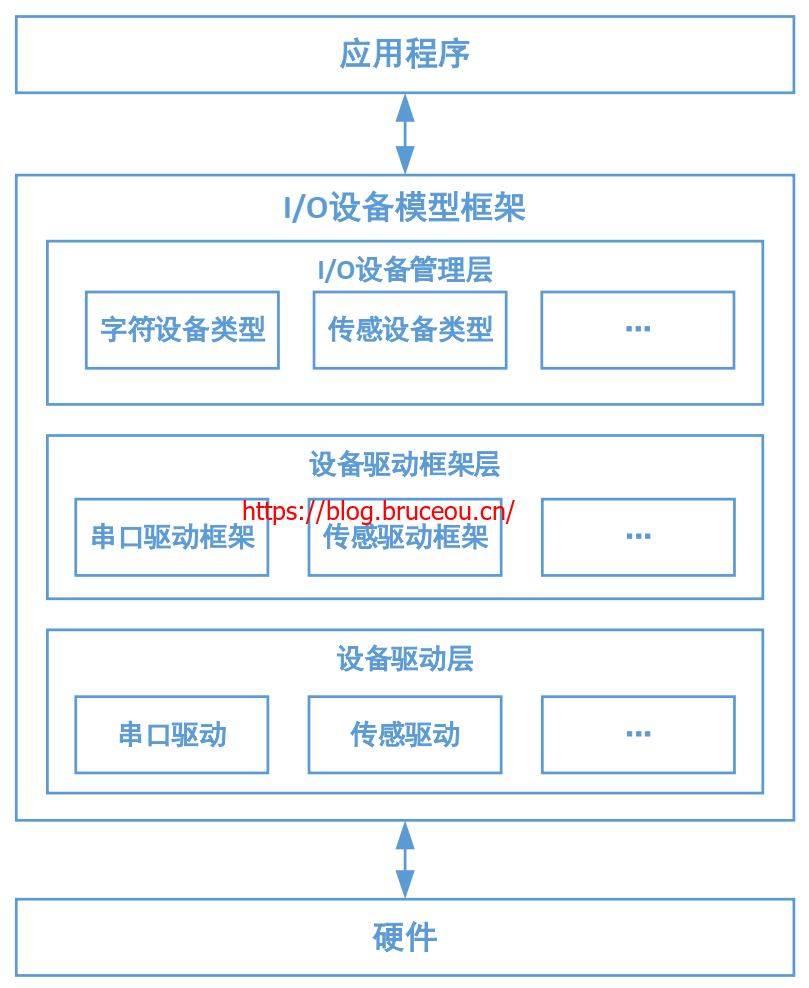
应用程序通过 I/O 设备管理接口获得正确的设备驱动,然后通过这个设备驱动与底层 I/O 硬件设备进行数据(或控制)交互。
I/O设备模型框架位于硬件和应用程序之间,共分成三层,从上到下分别是 I/O 设备管理层、设备驱动框架层、设备驱动层。
-
I/O设备管理层实现了对设备驱动程序的封装。应用程序通过 I/O 设备层提供的标准接口访问底层设备,设备驱动程序的升级、更替不会对上层应用产生影响。这种方式使得设备的硬件操作相关的代码能够独立于应用程序而存在,双方只需关注各自的功能实现,从而降低了代码的耦合性、复杂性,提高了系统的可靠性。
-
设备驱动框架层是对同类硬件设备驱动的抽象,将不同厂家的同类硬件设备驱动中相同的部分抽取出来,将不同部分留出接口,由驱动程序实现。
-
设备驱动层是一组驱使硬件设备工作的程序,实现访问硬件设备的功能。它负责创建和注册 I/O 设备,对于操作逻辑简单的设备,可以不经过设备驱动框架层,直接将设备注册到 I/O 设备管理器中。
更加详细的内容请参看RT-Thread官方手册。
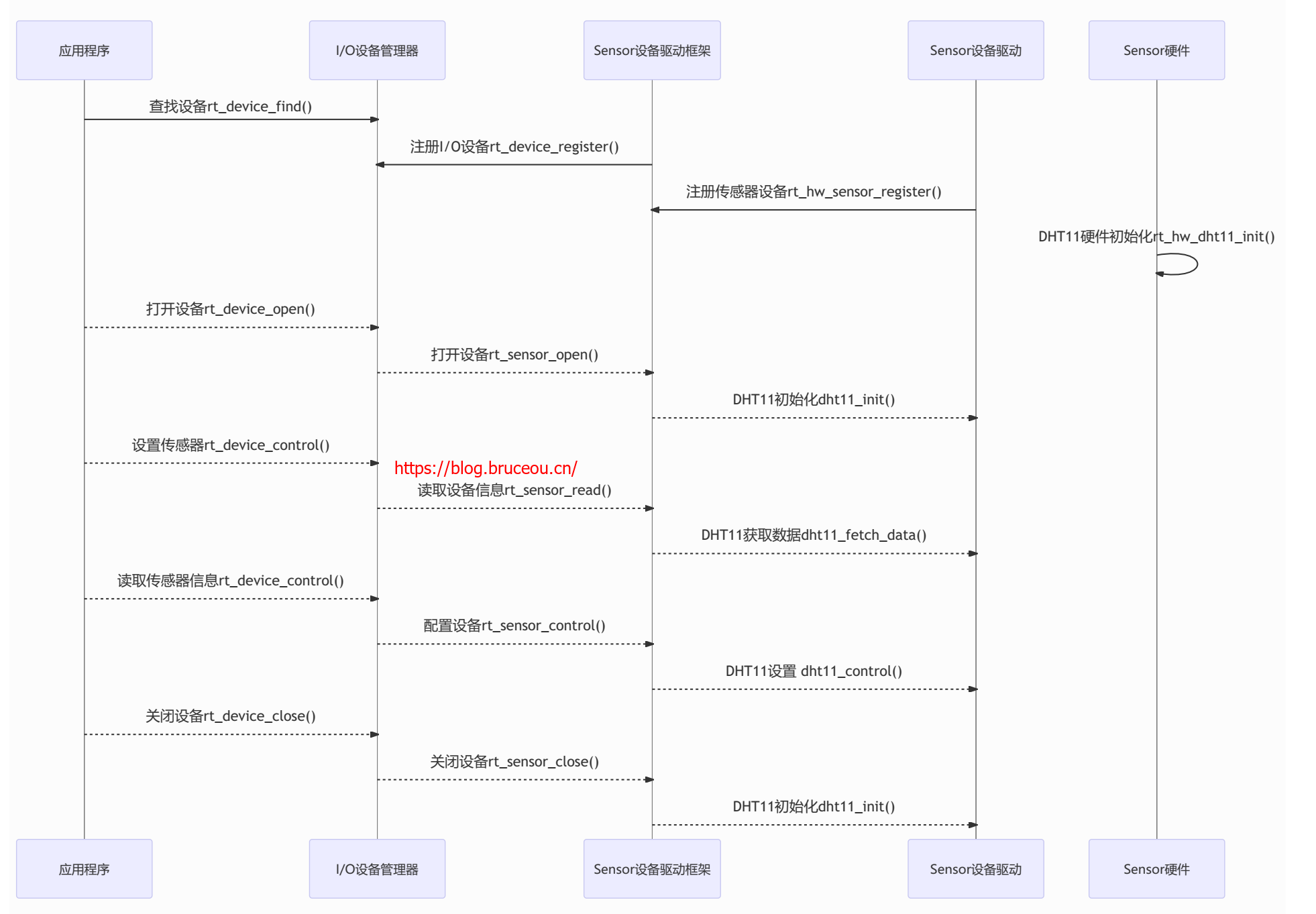
这里主要讲解Sensor驱动,RT-Thread将各个Sensor进行抽象,将不同厂商的Sensor合并为Sensor设备,从而提高了代码的重用性,提高开发效率。既然是总结,这里就只说重点,先看看DHT11设备驱动的时序图:
传感器数据接收和发送数据的模式分为 3 种:中断模式、轮询模式、FIFO 模式。在使用的时候,这 3 种模式只能选其一,若传感器的打开参数 oflags 没有指定使用中断模式或者 FIFO 模式,则默认使用轮询模式。
oflags 参数支持下列参数:
#define RT_DEVICE_FLAG_RDONLY 0x001 /* 标准设备的只读模式,对应传感器的轮询模式 */
#define RT_DEVICE_FLAG_INT_RX 0x100 /* 中断接收模式 */
#define RT_DEVICE_FLAG_FIFO_RX 0x200 /* FIFO 接收模式 */DHT11设备比较简单,采用的是轮询模式,其设备注册函数如下:
result = rt_hw_sensor_register(sensor, name, RT_DEVICE_FLAG_RDONLY, RT_NULL);硬件初始化如下:
static int rt_hw_dht11_port(void)
{
struct rt_sensor_config cfg;
cfg.intf.user_data = (void *)DHT11_DATA_PIN;
rt_hw_dht11_init("dht11", &cfg);
return RT_EOK;
}
INIT_COMPONENT_EXPORT(rt_hw_dht11_port);注意INIT_COMPONENT_EXPORT表示组件初始化,初始化顺序为4。
好了,DHT11就讲到这里了。
资源获取方法
1.长按下面二维码,关注公众号[嵌入式实验楼]
2.在公众号回复关键词[Art-Pi]获取资料提取码

